Overview
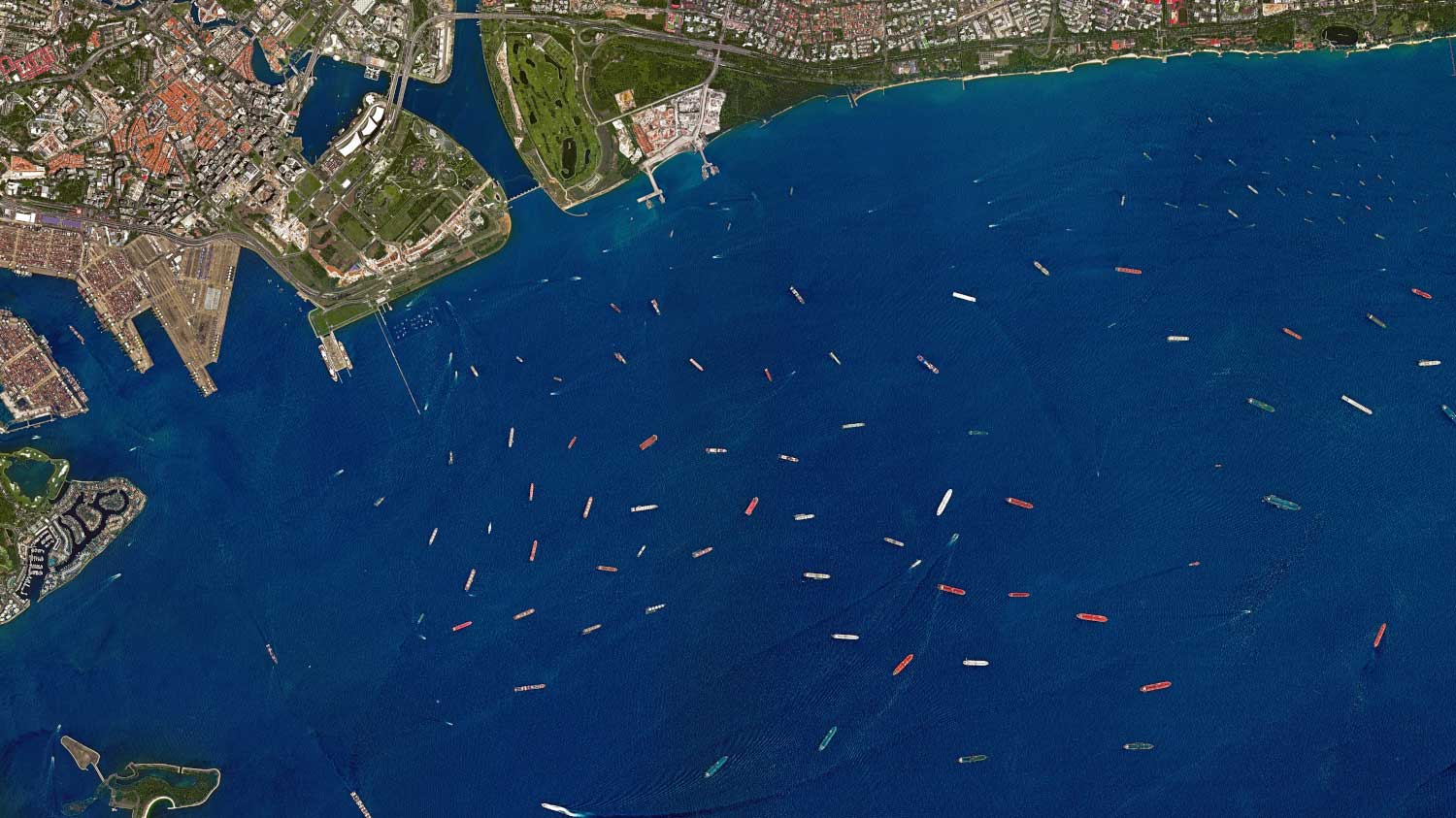
Maritime surveillance systems rely heavily on radar and transponder-based tracking, leaving non-cooperative vessels, such as refugee boats, undetected. That creates blind spots in open-sea monitoring and contributes to preventable loss of life.
The goal of OCEANS-18 was to design and prototype a low-cost satellite-based detection system capable of identifying vessels not present in maritime tracking systems, extracting geolocation data from imagery, and supporting cross-referencing with existing maritime databases.
Full Research Paper: IEEE Xplore
System Architecture & Technical Approach
The project was structured as a full-stack aerospace system, combining space, detection, and ground segments.
- Space Segment 3U CubeSat structure, optical payload for Earth observation, onboard computing for data acquisition, and a sensor suite including GPS, IMU, barometer, and thermometers.
- Detection Pipeline Image acquisition, vessel detection using computer vision, coordinate extraction, and cross-referencing with maritime traffic databases.
- Ground Segment Post-processing of collected data and integration with external datasets for validation.
Prototype Development & Testing
A key aspect of the project was the physical development and validation of a working prototype.
CubeSat Prototype
We designed and assembled a 3U CubeSat engineering model including a custom nylon frame, dual onboard computing system, integrated sensor stack, and a power system with batteries and solar panels.
Stratospheric Balloon Test
To simulate near-space conditions, the CubeSat was launched via a stratospheric balloon at 20–40 km altitude and tested for image acquisition, sensor data collection, system stability, and power management.
This helped validate hardware performance under realistic conditions, the data collection pipeline, and the integration between subsystems.
Expected Outputs from Testing
- Captured images with associated metadata such as position and orientation
- Real-time telemetry transmission
- Post-flight data recovery and analysis

Detection System & Algorithm Design
The detection system was designed to operate on low-resolution satellite imagery, introducing unique constraints.
Core approach:
- Object detection using deep learning, specifically Faster R-CNN
- Transfer learning applied to maritime datasets
- Multi-band image processing using RGB and infrared when available
Key challenges:
- Low resolution and limited pixel representation of vessels
- Environmental variability from weather, lighting, and sea conditions
- False positives from sea disturbances
Design decisions:
- Prioritized detection over classification in early stages
- Focused on robustness across varied atmospheric conditions
- Leveraged diverse training datasets for generalization

Hardware Design Considerations
Payload
An optical camera with 2048×2048 resolution was designed for visible-spectrum acquisition, balancing cost against sensing capability.
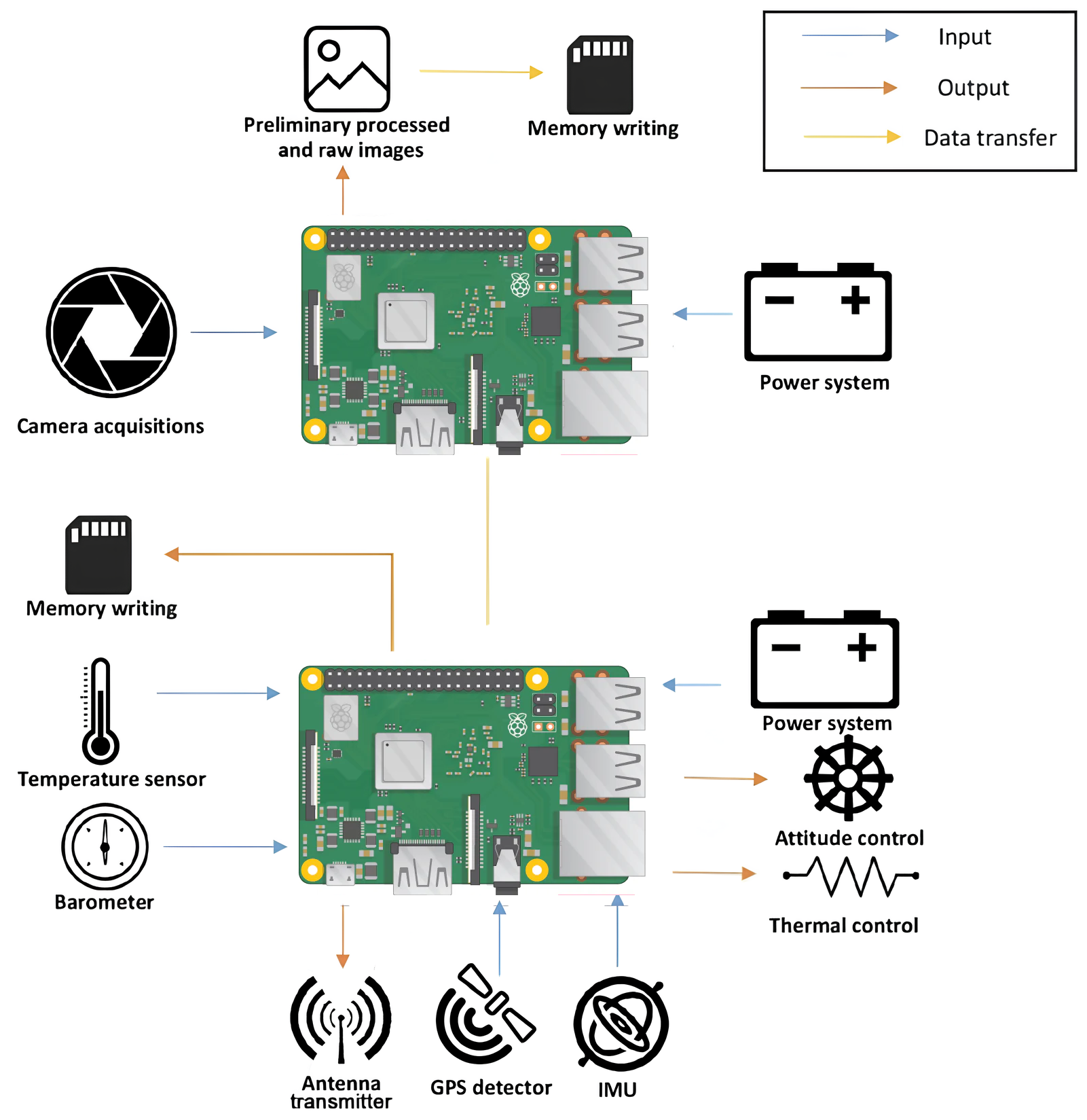
Onboard Computing
A dual Raspberry Pi architecture separated image acquisition from sensor data management.
Data Handling
Images were stored onboard because of bandwidth limitations, while metadata was transmitted in real time and post-processing happened at the ground station.
Key Engineering Trade-offs
- Cost vs Resolution Low-cost hardware limits detection precision.
- Latency vs Accuracy Real-time processing trades off against post-processing reliability.
- Coverage vs Infrastructure Satellite scalability must be balanced with deployment cost.
These trade-offs directly influenced system architecture and development priorities.
Results & Learnings
Technical outcomes included the successful design and assembly of the CubeSat prototype, validation of the data acquisition pipeline, and feasibility of vessel detection from optical imagery.
System-level learnings included the importance of latency in real-time tracking scenarios, the sensitivity of detection to environmental conditions, and the need for a scalable constellation for meaningful coverage.
Product & Strategic Considerations
While primarily technical, the project surfaced clear product insights: the real value lies in decision support, integration with existing maritime systems is critical, and scalability through a constellation model is required for meaningful impact.
This reframed the system as a maritime intelligence platform rather than just a sensing tool.
Future Development
- Onboard real-time processing with edge AI
- Multi-satellite constellation deployment
- Improved sensing with infrared and higher resolution
- Predictive vessel tracking models